近日,建设工程学院交通运输系博士生刘骜及其导师钟绍鹏教授的研究论文“Joint optimal pricing strategy of shared autonomous vehicles and road congestion pricing: A regional accessibility perspective”正式发表于城市规划领域顶级期刊《Cities》(SSCI,JCR Q1,Journal Citation Indicator排名2/77,我校建艺学院城乡规划TOP期刊)。该文为大连理工大学、长安大学与美国北卡罗来纳大学教堂山分校等研究机构的合作研究成果。
全文链接:https://authors.elsevier.com/c/1iI3wy5jOr6Xb
近年来,为了缓解日益严重的交通拥堵问题,共享自动驾驶汽车(Shared Autonomous Vehicles, SAVs)和道路拥挤收费政策这两种新兴交通技术引起了学术界的广泛关注。然而,新技术的引入不是盲目的,它们在实施过程中必将会对城市产生多方面的影响。因此,为实现基于可达性的规划和发展理念,迫切需要识别并优化SAVs和道路拥挤收费政策对区域可达性带来的负面影响。
为此,本文通过建立多目标双层规划模型研究了考虑可达性的SAVs和道路拥挤收费联合最优定价问题。同时,由于双层规划模型中决策变量与目标函数之间的关系复杂,属于黑盒问题,我们还创新性地应用了多目标贝叶斯优化算法对所提出的模型进行求解,并以江阴市实际数据为例,验证了本文提出的模型和求解方法。
本文的研究结果表明,SAVs与道路拥挤收费的组合实施策略对于促进交通系统与土地利用系统的性能提升,实现城市的可持续发展具有重要作用。但是,该效果是以“合适”的定价政策为前提的。若忽略定价政策的影响,SAVs与道路拥挤收费组合策略的实施可能会导致区域可达性与总流量时间分别恶化22.2%与5.0%。相较而言,最佳SAVs与拥挤收费的组合定价方案不仅能够缓解城市拥堵、提升交通网络整体运行效率,还能够优化城市空间布局、促进城市紧凑发展,最终实现14.0%的区域可达性提升与18.5%的总流量时间减少。此外,敏感性分析结果表明随着SAVs渗透率的增加,区域可达性表现为单调递增,而总流量时间为先增后减。
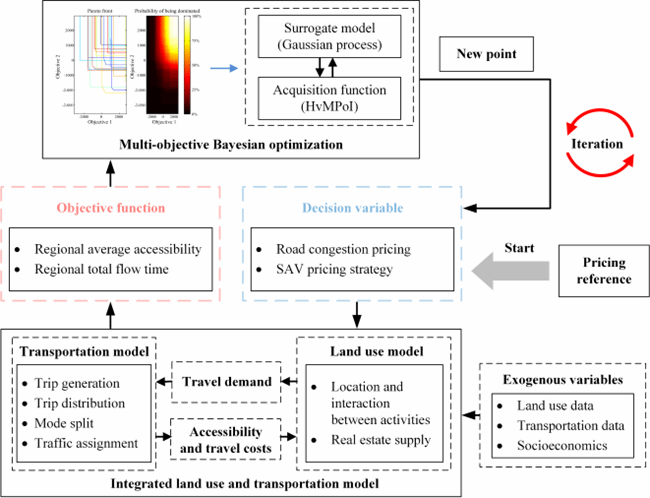
图1 SAVs和道路拥挤收费联合最优定价模型优化过程
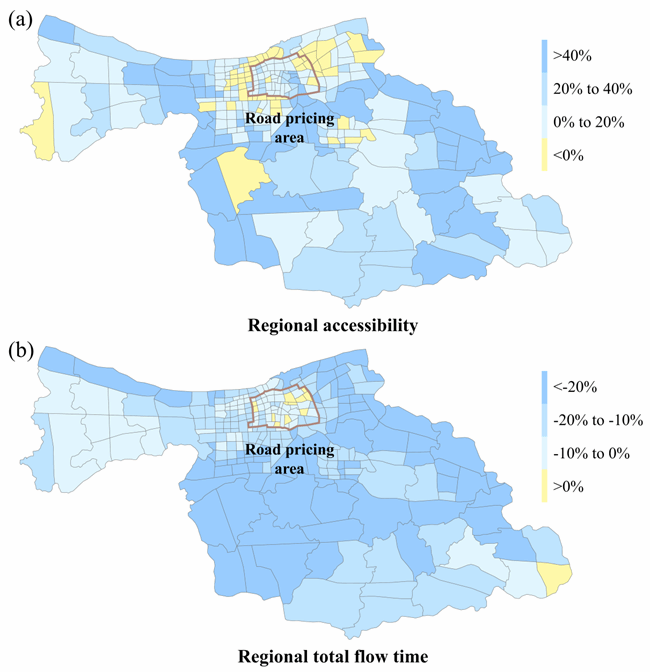
图2 相较于趋势发展方案,最佳SAVs与拥挤收费定价方案对目标函数的影响:(a)区域可达性,(b)区域总流量时间
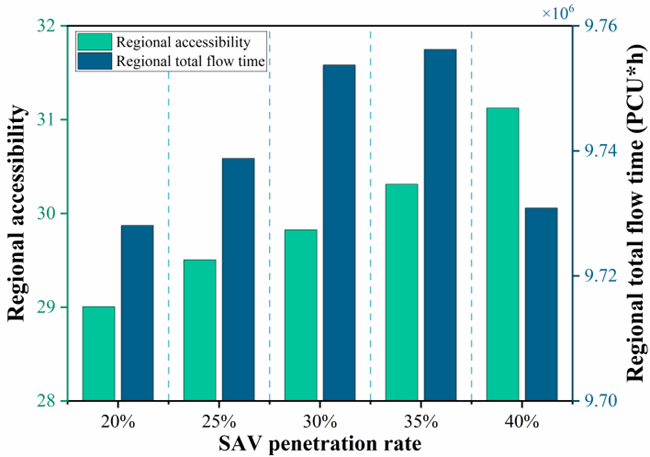
图3 目标函数随SAVs市场渗透率的变化图
论文第一作者为大连理工大学博士研究生刘骜,第二作者及通讯作者为大连理工大学钟绍鹏教授,论文合作者还包括长安大学孙健教授、大连理工大学博士研究生龚云海、大连理工大学硕士毕业生范美含、美国北卡罗来纳大学教堂山分校宋彦教授。



